

南昌艾克威爾介紹常見的機器人構型
機器人常見的構型是用其坐標特性來描述的,根據手臂坐標的形式的不同,可將機器人構型分為以下四類:直角坐標型,圓柱坐標型、坐標型和多關節型。從工作范圍、占地空間、定位精度、運動直觀性以及運動時對末端姿態的影響等方面進行分析,上述不同構型的機器人的特點如下:
(1)直角坐標型機器人是運動方式為簡單的種機器人.其機構示意圖如圖2.3 a )所示。機器人的三個運動關節全部為移動關節(PPP),其手部末端的空間位置的改變是靠三個相互正交的軸向運動來實現的。該類型的機器人結構簡單、承載能力大、定位精度高,在運動上可以實現完全解藕。但其缺點是占地面積大、動作范圍小,使用時要求較大的平面安裝區域。
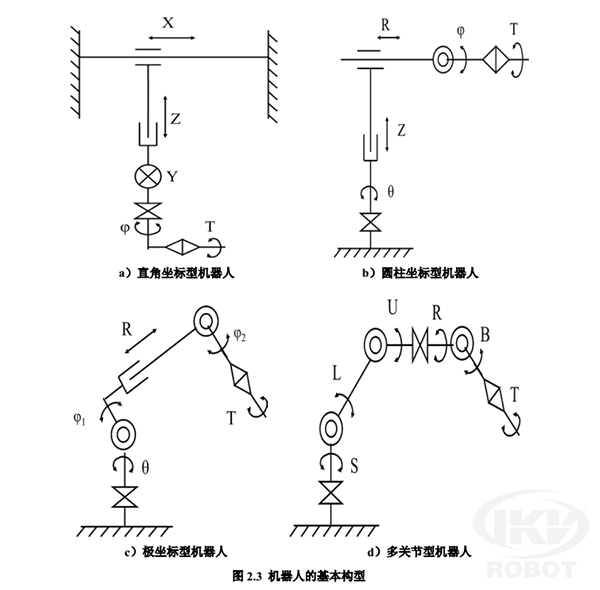
(2)圓柱坐標型機器人,如圖2.3 b)所示,其手部末端的空間位置的改變是靠1個轉動關節和2個移動關節(RPP)來實現的。該類型機器人結構相對簡單,定位梢度適中,動作范圍較大并且在運動空間范圍內無奇異點,各運動部件之間無禍合性較弱,控制方式也較簡單,通常用可于搬運作業。不足之處是其自身占據空間也較大。
(3)坐標型機器人(也稱球面坐標型).如圖2.3 c ),其手部末端的空間位置的改變是靠2個轉動關節和I個移動關節(RRP)來實現的。該類型的機器人的優點是具有較大的工作空間,較好的運動靈活性及較小的自身占地空間內。缺點是其結構相對復雜,各運動部件之間的運動禍合性較強,因此相應的控制系統也比較復雜。
(4)多關節型機器人,如圖2.3 d)所示,其手部末端的空間位置的改變是完全靠轉動關節(RRR)來完成的。機器人以各相鄰運動部件之間的相對轉角位移作為坐標系,其兩個臂部的長度尺寸比例決定了機器人手臂末端所能達到區域的大小。該種類型構型的機器人其有占地面積小、動作范圍大、運行速度快、運動靈活性好等優點,但在運動梢度、控制計算量方而不及直角坐標型機器人和圓柱坐標型機器人,而且其工作空間內存在奇異點,控制較為復雜。
工業機器人是面向工業領域的多關節機械手或多自由度的機器裝置,它能自動執行工作,是靠自身動力和控制能力來實現各種功能的種機器。艾克威爾內專業工業機器人制造商,提供工業機器人在焊接、噴涂、碼垛、搬運等方面被廣泛應用。自動搬運機器人:www.v6351.cn

