

物流倉儲AGV工作原理及組成
發布日期:2016-10-09?作者:IKV機器人
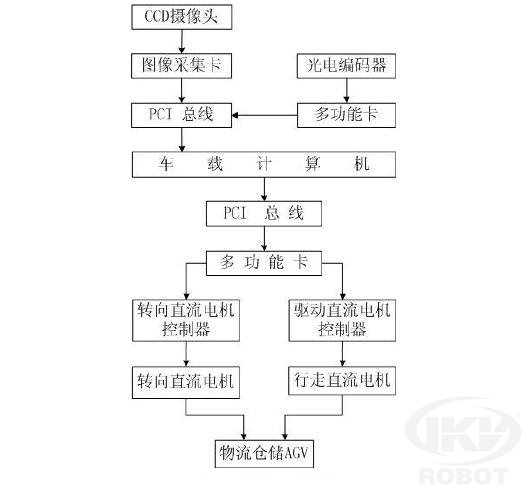
物流倉儲AGV的工作系統如圖所示,其工作原理是通過CCD攝像頭實時采集標識線圖像到圖像采集卡,采集的數據被及時的傳到計算機內存或顯存,車載計算機完成對圖像的讀入、處理,并根據圖像處理的結果完成車輛的導航控制。在計算機中進行圖像實時處理,等控制命令生成后,通過置于計算機內部的數據采集卡發送到電機控制器,驅動直流電機完成AGV的調速和轉向。
AGV作為物流行業流動的血脈,在日常的生產過程中扮演著很重要的角色。如同其樣,物流倉儲AGV也由導引系統、動力系統、控制和安全系統等部分構成。
1、導引系統:AGV的引導方式主要有電磁感應引導,激光引導,圖像的視覺引導等等。考慮到物流倉儲AGV的工作環境和特點并綜合幾種導引方式的優缺點,本文采用以CCD攝像頭為基礎的標識線圖像識別引導方法。
2、動力系統:物流倉儲AGV的動力由電機提供,并配有大容量的蓄電池,為整個小車提供動力來源,左右后輪都由電機驅動,保證了小車的的機動性。
3、控制系統:物流倉儲AGV上配有車載計算機,實時處理各硬件傳來的信息,實現AGV的基本功能并保證各種行為的品質。
為了獲得更好的機動性和靈活性,AGV小車采用四輪式結構,前輪轉向,后輪驅動的方式,由蓄電池供電。南昌艾克威爾專業AGV小車生產企業,根據企業生產需求提供高性能AGV設備。AGV智能倉儲:www.v6351.cn

